
2020年03月16日
各位
株式会社IHI
あいおいニッセイ同和損害保険株式会社
沖電気工業株式会社
国立大学法人名古屋大学
一般財団法人日本自動車研究所
株式会社日本総合研究所
自動運転車両による「住宅地における路車間通信」の実証実験について
~道路側センサーが自動運転車両に交差点情報を提供、「右折」等の円滑化と安全確保を検証~
株式会社IHI、あいおいニッセイ同和損害保険株式会社、沖電気工業株式会社、国立大学法人名古屋大学、一般財団法人日本自動車研究所、株式会社日本総合研究所は、まちなか自動移動サービス事業構想コンソーシアム(※1)が取り組んでいる、住宅地での移動サービス向けの運行設計領域(※2、以下「ODD」)の検討・定義の一環として、本日から3月25日まで、神戸市北区筑紫が丘において、自動運転車両を用いた路車間通信の実証実験(以下「本実証実験」)を実施します。
本実証実験の目的は、自動運転車両が交差点での右折や合流をする際に、死角からの飛び出しなどに備えたり、発進・停止や加減速のタイミングを最適化させたりするための、車載センサーと道路側センサーの協調による仕組みの検証です。
具体的には、自動運転車両の死角領域を含めた道路側センサーのセンシング状況や精度を評価すると共に、他の車両に不快感を与えない、安全で円滑な自動運転車両の挙動のあり方を検証します。また、これらの評価を条件の異なる複数の交差点で実施することにより、交差点の違いによるリスクの違いも可視化します。
本実証実験の結果を踏まえながら、各参加団体はODDの精緻化を進めると共に、最適な自動運転車両の走行方法と道路側センサーのあり方について、さらに検討してまいります。
■本実証実験の内容
(1)実施概要
・実施地区: 神戸市北区筑紫が丘、広陵町、小倉台および桜森町
・実施場所: 優先道路と非優先道路による交差点
(十字路2カ所、T字路1カ所の計3カ所)
・実施期間: 2020年3月16日(月)~2020年3月25日(水)
・実施主体: まちなか自動移動サービス事業構想コンソーシアム
・実証車両: 自動運転車両(ヤマハ製ゴルフカーをベース車体として,名古屋大
学が自動運転システムを開発)
車載センサーおよび道路側センサーから取得した交差点付近の交
通参加者の移動情報に基づき、発停車、加減速を判断する。
運転席および助手席には名古屋大学関係者が座り、万一の事態に
備える。
・通過車両: 手動運転車両(名古屋大学関係者が運転)
(A)自動運転車両が交差点を右折する際、対向車線を通過する。
(B)非優先道路を走行する自動運転車両が優先道路である対角車線
に合流する際、対角車線を通過する。
・一般車両、歩行者等 本実証実験では特に用意しない。ただし、一般車両および歩行者等
についても道路側センサーおよび車載センサーでは感知し、実証車
両の挙動に反映させる。
・道路側センサー: 交差点付近の電柱あるいは信号柱に、レーザセンサー(LiDAR)を設置
レーザセンサーが取得した交差点付近の交通参加者情報は、通信
機器を通じて実証車両に送信される。
・車載センサー: 以下写真参照

(2)実施の目的/内容
【目的】
①通過車両に不快感を与えない実証車両の挙動(交差点通過タイミング)の検証
・通過車両の助手席被験者および実証車両の同乗者被験者、そして実証車両周辺の
被験者にヒアリングを実施
②道路側センサーのセンシング精度の評価
・実際の車両速度/加速度と道路側センサーの計測値の誤差を比較検証
・道路側センサーによる実証車両の死角位置のセンシング状況の評価
③交差点の特性に応じたリスクの評価
・複数の交差点において、信号機、中央線・分離帯、歩道、側溝などの有無のほか、
一方通行や坂道、バス通りなどの条件に応じて異なるリスクを評価
【内容】
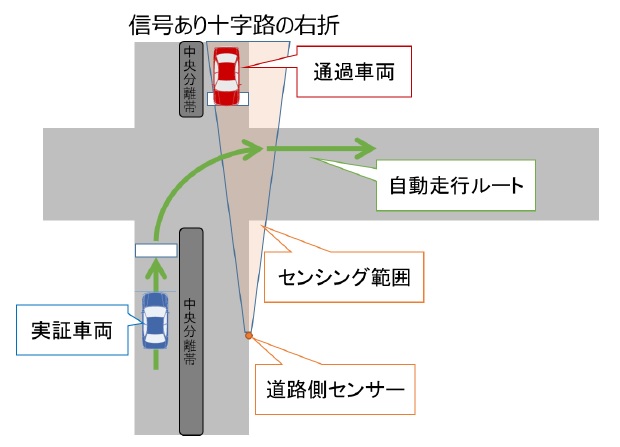
(A)信号あり交差点(十字路)での右折
信号交差点において、実証車両の右折挙動を検証する。
本実証実験は、対向車線を直線走行してくる通過車両の有無に分けて行う。実証
車両は、車載センサーおよび道路側センサーからの取得情報を活用して通過車両や
一般車両、歩行者等の有無を判断する。通過車両や一般車両、歩行者等が存在する
場合は、それらの挙動(速度、加速度等)に応じて右折する。
評価は、右折による交通流の妨害の程度によって判断する。
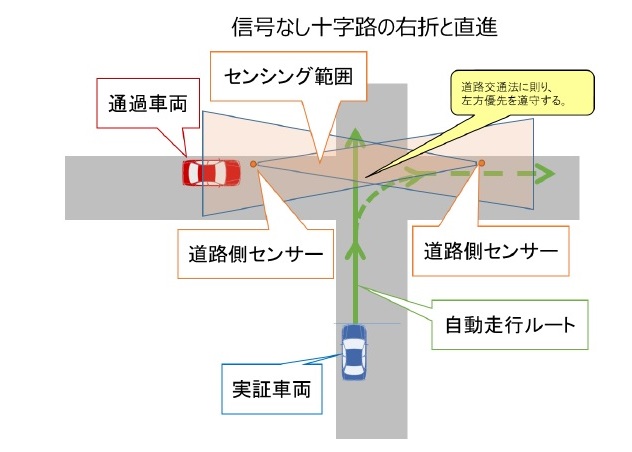
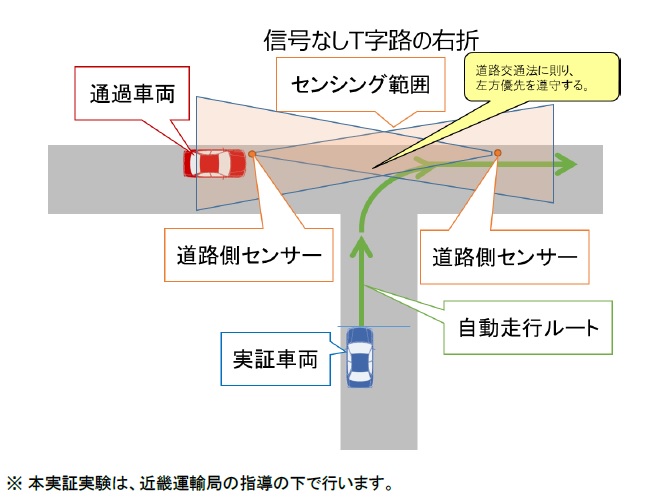
(B)信号なし交差点(十字路、T字路)での直進、右折
信号のない交差点(十字路およびT字路)において、実証車両の交差点通過挙動を
検証する。
本実証実験は、優先道路側の対角車線を走行する通過車両の有無に分けて行う。
実証車両は車載センサーおよび道路側センサーから取得した情報から対角車線を走行
する通過車両や一般車両、歩行者等の有無を判断する。優先道路側の対角車線を走行
する通過車両や一般車両、歩行者等が存在する場合は、それらの挙動(速度、加速度
等)に応じて加減速または停止を行う。
評価は、交差点通過タイミングによる交通流の妨害の程度によって判断する。
■本実証実験の役割分担
株式会社IHI(本社: 東京都江東区、代表取締役社長: 満岡次郎)
本実証実験では、一般ドライバー向け安全運転支援システム(DSSS: Driving Safety Support System)用として開発された交通流データ収集・分析技術を活用し、実証車両の交差点右折支援を行います。公道に設置したレーザセンサーが検知した交差点周辺の対向車両および歩行者の位置・速度情報を、専用の無線回線を介してリアルタイムで実証車両に通知します。
あいおいニッセイ同和損害保険株式会社(本社: 東京都渋谷区、代表取締役社長: 金杉恭三)
当社は、テレマティクス自動車保険のパイオニアとして、運転挙動のデータや事故時の映像データ等を活用した安全運転促進に関する独自のノウハウを蓄積しています。本実証実験では、それらのノウハウを活用し、自動運転車両の安全・安心な走行ルート設計の在り方について検討します。
沖電気工業株式会社(本社: 東京都港区、代表取締役社長: 鎌上信也)
当社は、道路交通情報通信システム(VICS: Vehicle Information and Communication System)や車両動態解析による渋滞予測技術や映像・電波・レーザなどのセンシング技術を有しています。本実証実験では、交差点に設置したレーザセンサーが周辺の歩行者や車両などの交通状況を検知し、通信を用いて実証車両にリアルタイムで通知することで走行支援を行います。
国立大学法人名古屋大学(所在地: 愛知県名古屋市、総長: 松尾清一)
ゴルフカーをベースとした自動運転車両のほか、独自に開発した自動走行用のソフトウェアを提供します。本実証実験では、これまで自動運転車両単体では不可能であった死角領域における対向車両や歩行者の検出を、インフラと協調することで可能にする、交差点の自動右折通過機能におけるセンシング領域の実証を行います。
一般財団法人日本自動車研究所(所在地: 東京都港区、理事長: 坂本秀行)
高度な自動運転を一般公道で実用化するには、利便性と安全性を高いレベルで両立することが必要となります。そのための走行コースの交通実態の把握、自動走行する上でのリスクアセスメント、最終的には許容できない危険を発生させないための方策の実装に至るまで、一連のプロセスや技術の検討と実証実験を通じて、安全性確保の手法を具体化します。
株式会社日本総合研究所(本社: 東京都品川区、代表取締役社長: 谷崎勝教)
本実証実験では、地域住民が安心して利用・参加できる自動移動サービスの実現を目的に、コンセプト立案から推進支援までの総合的なプロデュースを実施します。また、本実証地におけるサービスの実装に必要なODDの作成をとりまとめると共に、他地域への展開も見据え、簡易にODDを設計できる仕組みを構築します。
(※1) まちなか自動移動サービス事業構想コンソーシアム
住宅地内の店舗や公共施設、病院、バス停等までの、いわゆるラスト&ファーストマイルの移動サービスを持続可能にするための事業構想を目的に、2018年に日本総研が設立した、産官学民によるコンソーシアムです。自治会、自治体を含む産官学民が連携して、サービスの社会実装に必要なシステムの仕様や事業仮説について検討しています。
主催: 株式会社日本総合研究所
一般会員: 株式会社IHI、あいおいニッセイ同和損害保険株式会社、沖電気工業株式会社、
関西電力株式会社、ダイハツ工業株式会社、菱電商事株式会社
オブザーバー: 一般財団法人日本自動車研究所
協力会員: 神戸市、神戸市北区筑紫が丘自治会、神戸空港タクシー株式会社、
大和自動車交通株式会社、国立大学法人名古屋大学、みなと観光バス株式会社
https://www.jri.co.jp/page.jsp?id=33228
(※2) 運行設計領域(ODD: Operational Design Domain)
自動運転システムが正常に作動する前提となる設計上の走行環境に係る特有の条件のこと。
ODD に 含まれる走行環境条件としては、例えば次のものが挙げられます。
・道路条件(高速道路、一般道、車線数、車線の有無 、自動運転車の専用道路 等)
・地理条件(都市部、山間部、ジオフェンスの設定 等)
・環境条件(天候、夜間制限 等)
・その他の条件(速度制限、信号情報等のインフラ協調の要否 、特定された経路のみに限定
すること、保安要員の乗車要否等)
■参考資料
まちなか自動移動サービス 2019 実証実験の実施概要
https://www.jri.co.jp/file/pdf/company/release/2019/1206/outline.pdf
■本件に関するお問い合わせ先
株式会社IHI
広報・IR部 メディア広報・IRグループ 電話番号: 03-6204-7030
あいおいニッセイ同和損害保険株式会社
商品企画部 次世代商品R&D室 小谷 電話番号: 03-5789-6484
広報部 広報室 山下 電話番号: 03-5789-6315
沖電気工業株式会社
【報道関係者様】
経営企画本部 広報部 岡 電話番号: 03-3501-3835 e-mail: press@oki.com
【一般のお客様】
情報通信事業本部 社会インフラソリューション事業部 交通ソリューション第一部
電話番号: 03-3454-2111
お問い合わせフォーム: https://www.oki.com/cgi-bin/inquiryForm.cgi?p=071j
国立大学法人名古屋大学
未来社会創造機構事務室 電話番号: 052-747-6390
一般財団法人日本自動車研究所
国際渉外広報室 電話番号: 03-5733-7921 e-mail: sogomado@jari.or.jp
株式会社日本総合研究所
【報道関係者様】広報部 山口 電話:03-6833-5691
【一般のお客様】創発戦略センター 井上・武藤 電話:03-6833-2820